Einführung
Das AKKON Handrad W3 stellt die neuste Version des Handrades dar. Es dient in Verbindung mit einer CNC-Steuerung zur Bedienung einer CNC-Maschine. Hardware und Firmware sind so ausgeführt, dass das Handrad bei entsprechender Anpassung mit verschiedenen CNC-Systemen zusammenarbeiten kann. In Verbindung mit der CNC-Software AKKONDesk dient das Handrad zur Steuerung einer CNC-Maschine im Mauell- und Automatikbetrieb.

Features
- Not-Halt
- 2 analoge Schaltelemente zur Steuerung des Vorschubes und Spindelgeschwindigkeit
- 12 Cursortasten zur Steuerung von vier Achsen
- 9 Funktionstasten
- 12 Leuchdioden zur Statianzeige
- Signalgeber zur akustischen Anzeige des Tastendruckes
- Schnittstellen: USB- oder CAN-Bus
Bedienung
Bei Version W3 wurde das Drehrad durch Tasten ersetzt. Damit können nun auch zwei oder mehrere Achsen gleichzeitig verfahren werden. Die Tastenfunktionen wurden so gewählt, dass das Referenzieren, Werkzeugwechsel und Vermessung, Antouchieren, Programmauswahl und dessen Ausführung mit dem Handrad gesteuert werden können. Nachfolgende Abbildung zeigt die Bedienelemente des Handrades.

Zum Verfahren von vier Achsen stehen 12 Cursortasten zur Verfügung. Vier Tasten dienen dabei zum gleichzeitigen Verfahren der x- und y-Achse im Einhandbetrieb. Vorschub und Spindeldrehzahl können über die beiden Potentiometer, welche über den Cursortasten angeordnet sind, verändert werden. Weiter stehen neun Funktionstasten zur Verfügung, mit deren Hilfe wesentliche Funktionen für der Manuell- und Automatikbetrieb gesteuert werden können. Über die Funktionstaste „FN“ kann jeweils die zweite zugeordnete Tastenfunktion erreicht werden. Die Not-Halt-Taste ist zweikanalig ausgeführt und führt getrennt von der Handradsteuerung zur Sicherheitssteuerung.
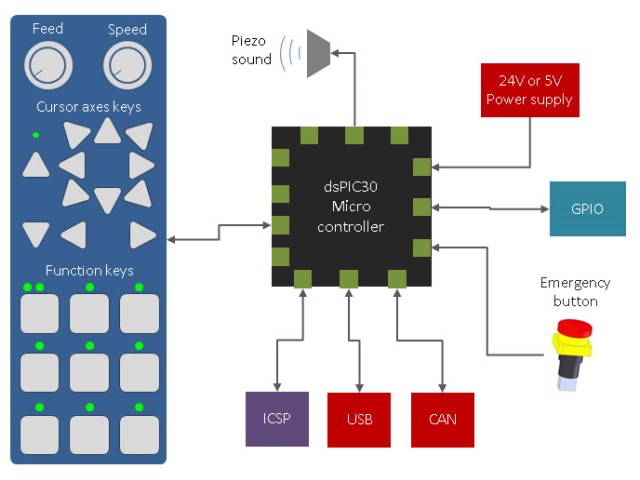
Steuerung und Schnittstellen
Die Steuerung des AKKON Handrades erfolgt durch einen Mikrocontroller. Die Kommunikation mit der CNC-Steuerung erfolgt entweder über USB- oder CAN-Bus. Je nach Verwendung ergibt sich eine unterschiedliche Bestückung. Die Spannungsversorgung des Handrades erfolgt entweder per USB oder bei Einsatz des CAN-Busses über eine externe 24V Spannungsquelle. Weiter stehen freie Ein-/Ausgänge für künftige Erweiterungen zur Verfügung. Die Programmierung und Debugging kann über das In-Circuit-Serial Programming interface erfolgen.